Dynamic Map Platform Co., Ltd. (Head Office: Shibuya-ku, Tokyo; President & CEO: Shuichi Yoshimura; hereinafter “the Company”) announced that it spoke as a speaker at a session for the automation in aiports in the 38th IATA Ground Handling Conference (IGHC), held in Cairo, Egypt from Tuesday, May 19 to Thursday, May 21, 2026, upon invitation from the organizer IATA (International Air Transport Association).

IGHC is a major international conference in the ground handling sector where key players in the aviation industry – including airlines, airport operators, ground handling service providers, and system providers – gather to discuss the advancement of operations, the adoption of new technologies, and the establishment of industry standards.
IATA has been developing the international standards for the automation of ground support equipment (GSE) and the maps (eco-system) required for it. IATA has highly appreciated our support for the activities and invited us to speak at this conference about the automation technology.
The Company presented use cases focused on “Taxiway crossings” and “Accident prevention in blind spots” involving autonomous vehicles. To operate autonomous vehicles safely and efficiently around aircraft, on taxiways, and at intersections, it is essential to provide the information required by the autonomous vehicles—such as the positions and movements of surrounding vehicles and aircraft, as well as traffic rules and constraints—in real time and linked to location data. We demonstrated that vehicle-mounted sensors alone are insufficient for this purpose, and that coordination and collaboration between vehicle sensors and Dynamic Maps*1 is indispensable.
In this panel session, the Company provided a specific example using “VIPS (Various Information Port System) or Dynamic Maps” a data integration platform currently under development by our company. VIPS integrates and shares dynamic map information*2 obtained from cameras and various other systems.
In December 2025, the operation of GSE vehicles at Level 4*3 of autonomous driving was successfully implemented within restricted airport areas in Japan. Currently, Level 4 autonomous driving is limited to areas around the terminal. Moving forward, there is a need to address more complex environments—such as crossing service lanes (vehicle routes that intersect aircraft taxiways)—as well as the phased expansion of operational areas and an increase in the number of vehicles in operation. This panel also addressed the importance of an information sharing infrastructure under the environment of more automation in the next phases and expressed the view that Dynamic Maps (VIPS) or similar ecosystems are essential.
Following the panel discussion, we received feedback from multiple airlines and airport operators, including comments that the session deepened their understanding of the necessity of Dynamic Maps.
The Company will continue to promote initiatives in data integration and standardization based on spatial information across a wide range of fields, including aviation, and contribute to the advancement of safe and efficient social infrastructure.
<Overview of the 38th IATA Ground Handling Conference (IGHC)>
Dates: Tuesday, May 19 – Thursday, May 21, 2026
Venue: InterContinental Citystars Cairo by IHG (Cairo, Egypt)
Organizer: IATA (International Air Transport Association)
Official Website: https://www.iata.org/en/events/all/iata-ground-handling-conference/
*1 Dynamic Maps: See “About the Dynamic Map” below.
*2 Dynamic Map Information: Information constituting “Dynamic Maps”, including both static information – such as restricted areas due to construction or immobilized vehicles – and dynamic information, such as positions of aircraft and vehicles.
*3 Level 4 Autonomous Driving: A state in which the automated driving system performs all driving tasks under specific conditions, such as defined locations, weather, and speed.
<About Dynamic Maps>
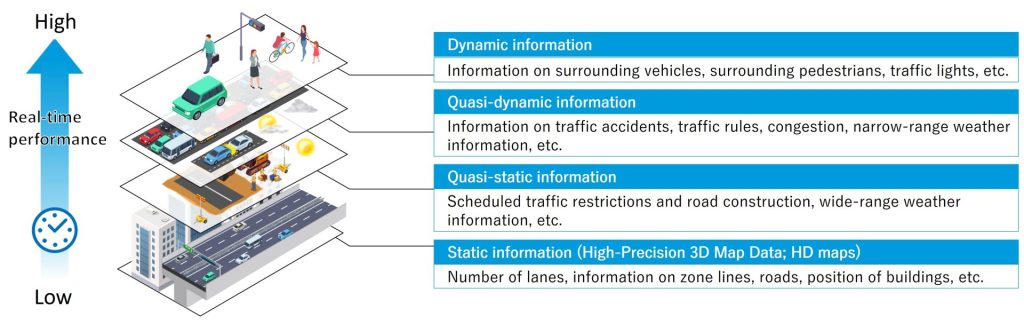
Dynamic Maps refers to a map database concept consisting of information categorized into four layers based on the real-time nature of the data. The Company provides High-Precision 3D Map Data forming the foundation of “static information,” including lane and road surface data, while also working on the development of a data integration system for autonomous driving that collects and distributes dynamic map information ranging from static to dynamic data.
By delivering road conditions to autonomous vehicles in advance through this system, it helps prevent traffic accidents and contributes to the realization of safe and reliable autonomous driving.