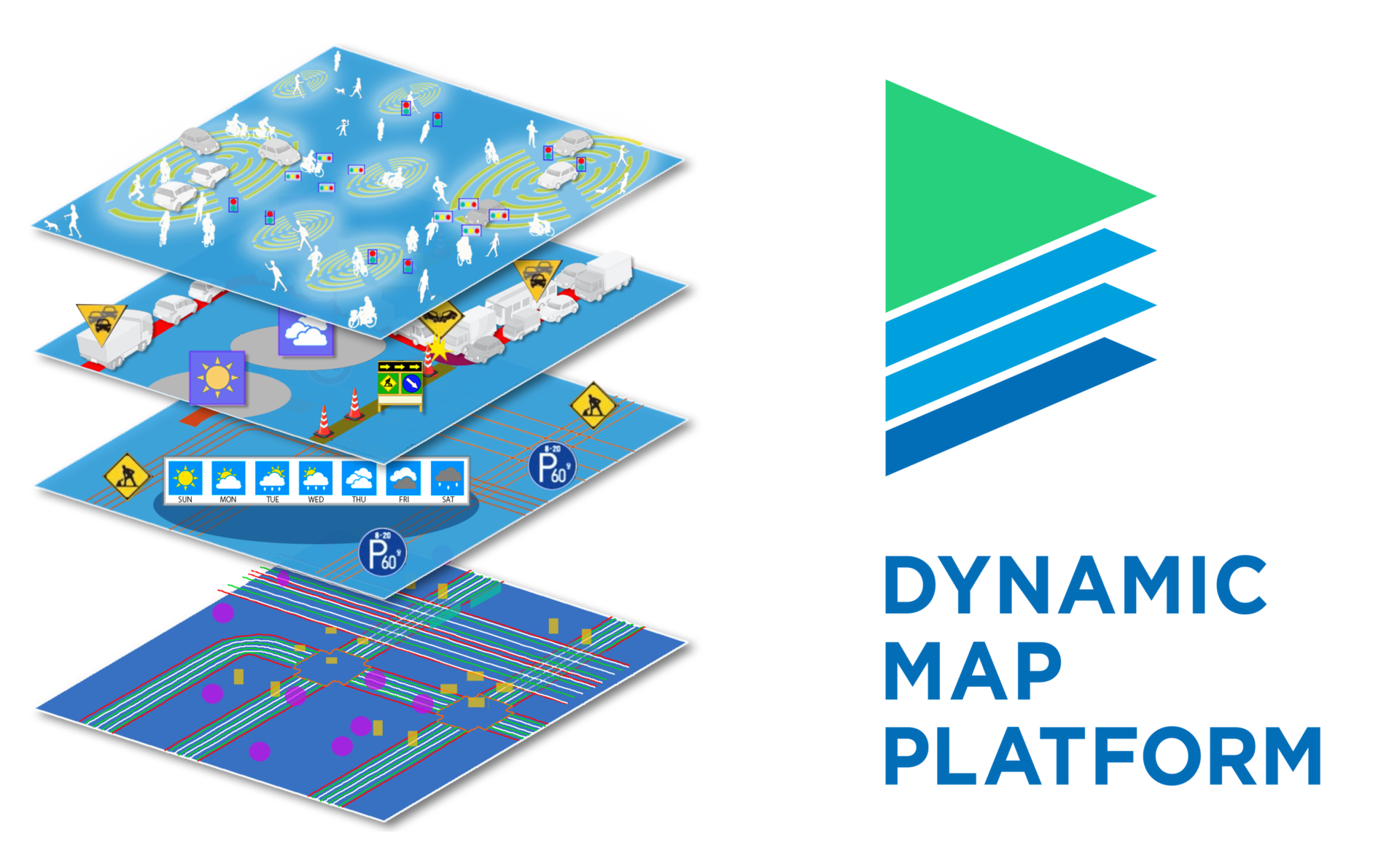
時間間隔で4階層に
「ダイナミックマップ」とは、自動運転システムの実現に必要とされる道路空間上の様々な情報を統合するデジタル地図のデータモデルです。
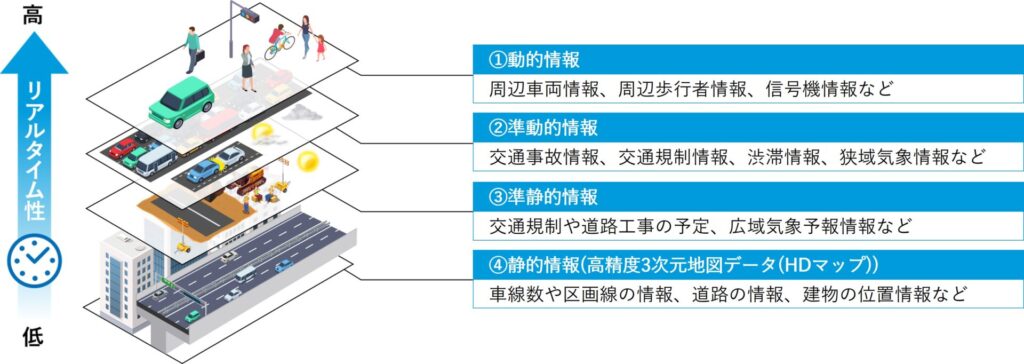
このモデルでは、各情報をその変化する時間間隔により4階層(レイヤー)に分類し、各レイヤーの情報を位置を基準として紐づけて利用します。4レイヤーの構成は、おおよそ秒から分単位で変化する①動的情報(信号情報や落下物等)、時間単位で変化する②準動的情報(気象情報や渋滞・規制情報等)、日単位で変化する③準静的情報(道路工事や交通規制予定情報)、月から年単位で変化する④静的情報(路面情報、車線情報や3次元構造物等)となります。
当社が提供するHDマップがこの4レイヤーの中で「基盤となる静的情報」の役割を担うという意味で、「ダイナミックマッププラットフォーム」という社名を掲げています。また、当社ロゴマークが、この4レイヤーをシンボル的に図案化したものであることに、お気づきいただけましたでしょうか。
カーナビ地図とHDマップの違いとは
さて、車両に搭載されるデジタル地図として、おなじみのカーナビ用地図があります。これは、ドライバー=人が読む地図であり、道路単位の情報や施設関連情報を2次元で表示し、データの位置精度は概ねメートル単位です。運転操作自体はドライバーが行うため、位置精度はメートル単位でも問題ありません。
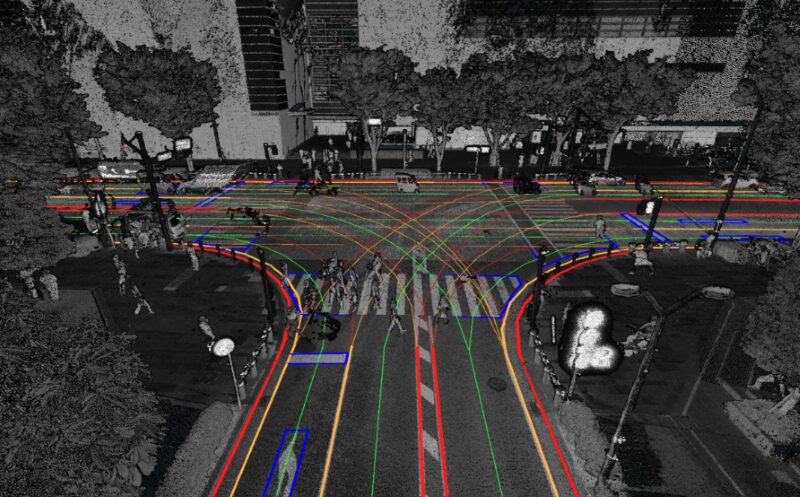
一方、自動運転用のマップは車両=機械が読んで走行制御に利用する地図であり、隣の車線への逸脱や停止線を越えた停車等は許されません。HDマップは白線や停止線、信号機等の道路上の構造物等をセンチメートル級の位置精度、かつ車線単位で3次元データ化しています。さらに、カーブの曲率や道路の勾配情報等も高精度に3次元化しており、自動運転システムの安全な加減速やスムーズなステアリングに貢献しています。精緻な勾配情報については、地球温暖化対策の観点から燃費やEVの電費の改善に有効に機能することも欧米で実証されています。
実空間とデジタル空間の橋渡し役に
最近では、個々の車両に搭載される単体HDマップから、ダイナミックマップとしての開発が本格的に進みつつあります。HDマップを基盤として前述の動的~準静的情報を紐づけることで、自動運転システムは、走行ルート上の工事情報や渋滞状況、あるいはゲリラ豪雨等天候の急変による危険個所等の様々な情報を走行制御に利用することが可能になります。国内では、国の研究開発プロジェクトや道路管理者による実証実験が積極的に展開されており当社も様々なプロジェクトに参画しています。さらに、このダイナミックマップのコンセプトを公道以外の分野にも展開するため、空港・工場等施設内の専用車両等を対象とした検討や実証実験にも取り組んでいます。
これらの事業を通じて、人と様々なモビリティが活動・運用される実空間(フィジカル)と、システムが認知・把握・制御するデジタル空間(サイバー)の共通表現を可能とするデジタルツインの基盤の役割を担っていくことを目指しています。


