こんにちは、執行役員 テクノロジー統括の福田 譲です。昨今では自動運転の社会実装が現実味を帯びる中、車両そのものの知能に加えて、車両と社会インフラをつなぐ通信環境の重要性が急速に高まっています。当社が取り組んできた自動運転実証にも、携帯電話網を用いて車両と通信ネットワークとの間で情報をやり取りする技術「V2N(Vehicle to Network)」を用いたユースケース実証が多数含まれます。これらの実証を通じて得られた知見を踏まえ、自動運転社会において通信が果たす役割と、その視点から見た当社のダイナミックマップについて紹介します。
自動運転社会と通信インフラ
自動運転技術は日進月歩で進化を続けているものの、車両単体のセンシングや判断能力の高度化だけでは不十分な状況が少なからず存在します。特にトラックやバスなどの商用車両においては、車両が安全に危険回避できるだけでは済まされず、そこに乗る乗客や荷物の安全まで考慮する必要があります。
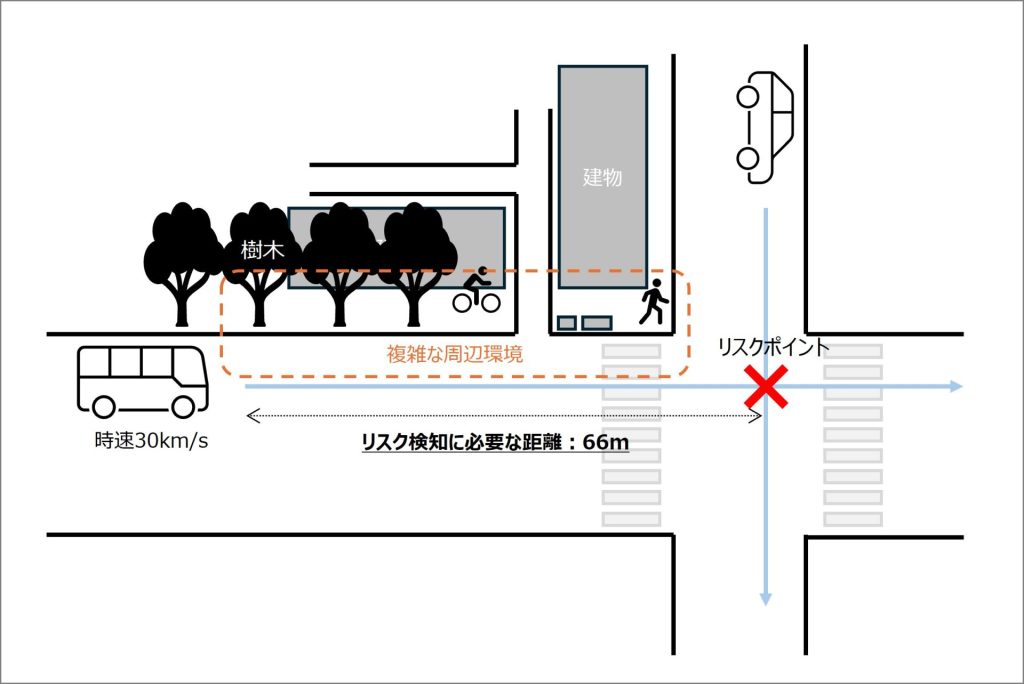
当社の取組みの一例としても、乗客に危険を及ぼすことなく車両停止させるためには時速30kmの走行で66m手前でのリスク検知が必要であると計算されており、その66mの区間内には、車両搭載センサーだけでは認識が難しい複雑な周辺環境が存在するといった考察があります。このような状況では、自動運転車両は外部からの情報提供支援を受けることにより、搭載センサーの限界を超えて周辺環境を認識する必要が出てきます。
センサーの限界を超えた周辺環境認識は商用車に限ったものではなく、乗用車におけるニーズとしても考えられます。安全性と快適性の両立によって車両の差別化が図られ、自動運転という高付加価値化に伴う価格影響が相殺される可能性を持つからです。急ブレーキや急ハンドルによる危険回避ではなく、快適走行のまま事前に認識したリスクを回避できることは新たな車両価値になる可能性があります。
では、外部からの情報提供とはどのように実現されるのでしょうか。これは比較的歴史が長く、V2X(Vehicle to Everything)という言葉でくくられる、車両と様々なものとの間でデータ通信を行う技術によって実現されます。V2XはさらにV2V(Vehicle to Vehicle)、V2I(Vehicle to Infrastructure)、V2Nといった技術に分類されますが、性能、コスト、社会受容性、各国法制度など様々な要因と相まってそれぞれの期待感や守備範囲の方向付けが少しずつ進んできました。
その中で現実的な社会実装、すなわち一般的な普及に最も近いのは、V2Nであろうと考えられます。携帯電話網による通信インフラと、コネクティッドカーという車両側の通信機能が既に普及しており、情報提供の仕組みを面的に整備する土台が社会に存在するためです。こうした車両側まで含めた通信インフラが、道路インフラと共に自動運転社会を成立させるための重要な社会基盤になると考えられます。
V2Nによって提供されるダイナミックマップ情報
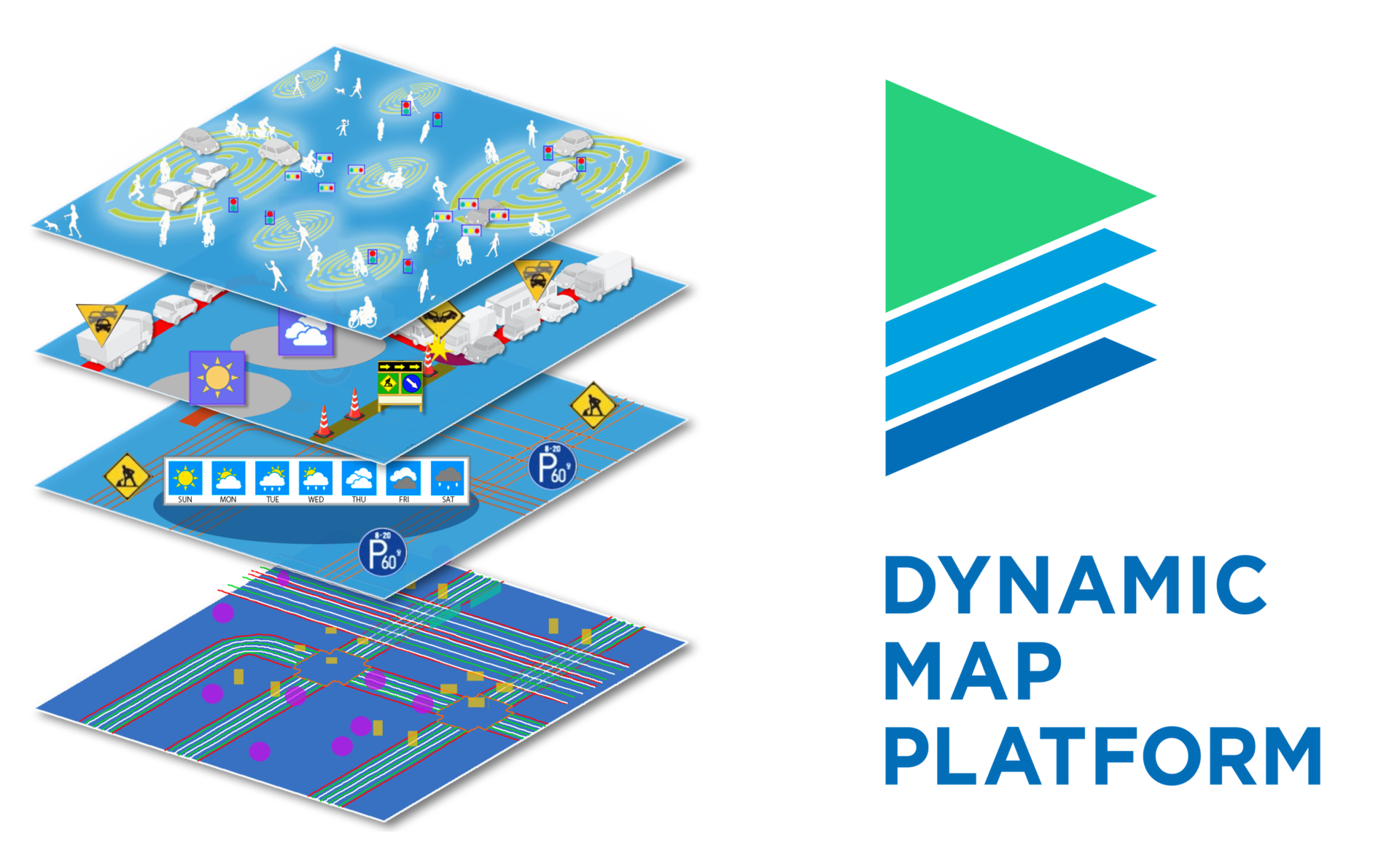
V2Nを通じて車両に届けられるべき情報は何でしょうか。過去のコラムでも言及されている通り、それがダイナミックマップと呼ばれるデータモデルのデジタル地図データです。
これは単なる地図データではありません。高精度3次元地図を基盤にして関連付けられた気象情報や路面状態、交通規制など動的に変化する情報となります。自動運転車両には何らかの形で高精度3次元地図が搭載されており、レーン単位の分解能でこの地図上での現在位置を把握しています。したがってダイナミックマップというモデルで提供される情報が自動運転車両にとって扱いやすく有効に機能することは容易に想像できると思います。
提供される情報コンテンツは具体的に何でしょうか。社会実装に向かう過程ではまだ断定的なことは言えないものの、様々な実証等を通じて下表の通り典型的なニーズが見えてきました。
| No. | コンテンツの種類 | 内容 | 必要とされる理由 |
|---|---|---|---|
| 1 | 先読み情報 | 時間的・距離的に先の情報 | センサー検知範囲外 |
| 2 | 死角情報 | 見通しの悪い交差点や防護壁・防音壁のある合流地点での周辺車両・交通参加者の情報 | センサー検知の物理的遮蔽 |
| 3 | センサー補助情報 | 西日逆光下での信号機灯火情報、緊急車両の情報 | センサー能力低下や誤検知誘発 |
この中でV2Nとの相性が良いのは先読み情報です。走行中の車両が数秒~数分先、数十メートル~数キロメートル先の情報をあらかじめ把握する目的のため、情報要求から受信までの許容時間が比較的長くなるためです。
代表的な情報コンテンツとしては気象情報や路面状態、落下物や渋滞末尾位置などがあり、既存の情報やその組み合わせによって準備できるものも多く、実現性観点でも社会実装への近さを感じます。カーナビゲーションシステムが渋滞情報を利用することで人の運転を支援する技術が一歩先へ進み、高精度・高分解能な情報によって自動運転車両の安全・快適な走行へと発展するイメージです。
他の2種類についてはリアルタイム性が要求されるため、本来はV2IやV2Vによって実現されるべきものですが、自動運転システム自体の技術進化によって課題解消していく可能性もあります。一部はV2Nによる実現を狙った実証や検討も行われており、当社でも空港業務車両向けに積極的な取り組みが続いています。
ダイナミックマップの社会実装に向けた通信環境の考察
V2Nによるダイナミックマップ提供の様々な実証を踏まえ、当社ではその商用化、社会実装へと着実に歩みを進めています。特に空港、港湾、物流施設といった狭域エリアを対象にしたサービスについては、公道に比べて早く実現していくことになると考えています。その際に安定したサービス品質を持続できるよう、通信環境の実力値に応じた適切なユースケースと提供情報の見極めを進めています。
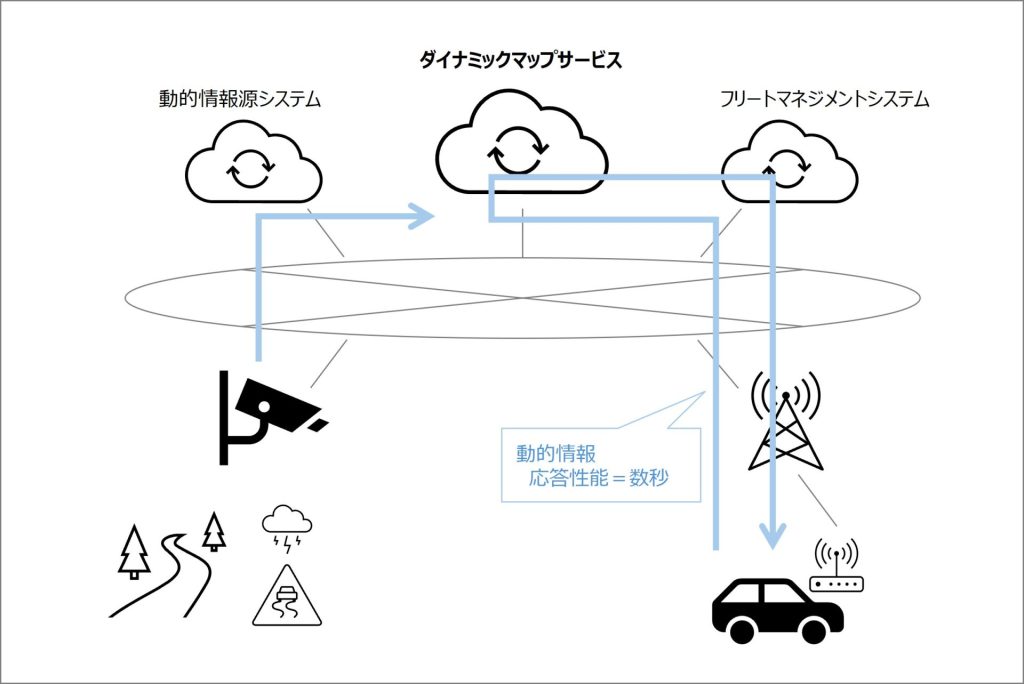
これまでの経験を踏まえると、ダイナミックマップを構成する動的情報に関してはターンアラウンドタイム数秒程度の情報提供サービスになると考えています。この数秒を更に通信とシステム処理に分解すると、実に70~90%を通信が占めることになり、通信の特性や実力値の見極めは非常に重要になります。これはモバイルデータ通信だけではなく、基地局から先のインターネット通信における現実的なスループットやその昼夜性能差など、複合的な要素を見極めることになります。
また、動的情報のデータソースには各種センシング機材、情報提供先には自動運転システムやフリートマネジメントシステムがあり、IoT向けに広く使われる軽量通信プロトコルも好んで利用されます。こういったプロトコルへの対応も含め、ダイナミックマップサービスは通信環境全体をデザインして実装されていきます。
おわりに
ここではダイナミックマップの現実的な社会実装形態としてV2Nにフォーカスし、その通信環境の重要性について述べました。この方向で着実に社会実装が進んでいくことは間違いありませんが、昨今の動向としてはダイナミックマップのモデルが想定するよりも高頻度(<1秒)で変化する情報も期待されるようになってきました。こうなるとV2Nよりも速く確実な応答性能が要求され、専用ネットワークに接続した個別システム/サービスの形態も必要になってきます。
当社は高精度3次元空間データの提供者として、市場が求める多様なニーズに対応し、デジタル社会の発展に貢献していきます。