自動運転と共同輸送により安全で効率的な物流を実現するシステムを開発
本システムでは、事業各社が開発したシステムを連携させることで自動運転トラックの安全な走行およびスムーズな共同輸送による物流最適化の実現に貢献します。
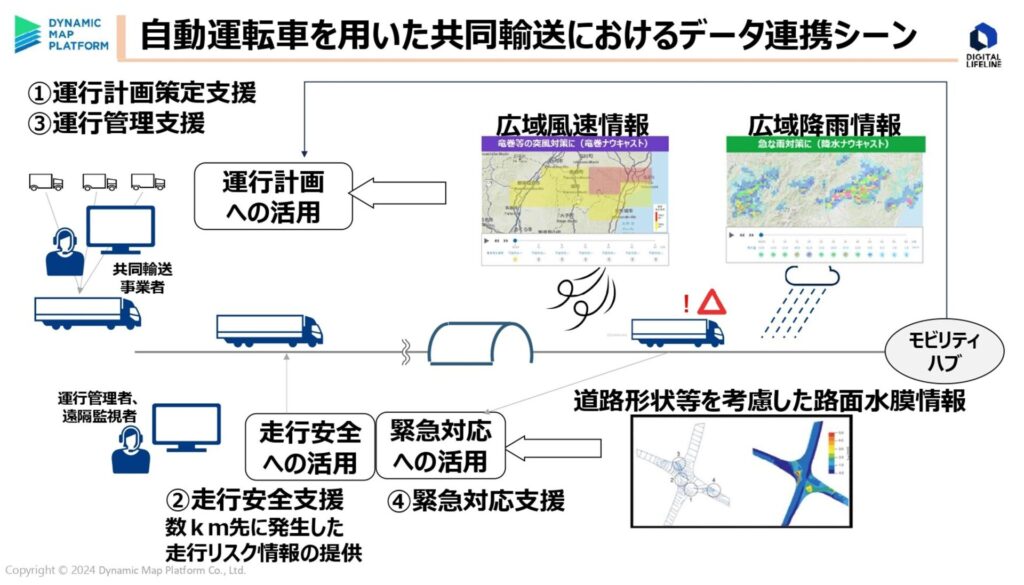
当社が開発した(1)ダイナミックマップ情報配信による自動走行支援システムにより、車両単独では検知出来ない数km先の情報を車両が認識可能となります。また、車両の正確な位置情報を物流事業者へ提供することで、運行管理、緊急時の退避判断が必要となるシーンなどでの活用が可能となります。
BIPROGY社が開発した(2)シミュレーションを用いたニアミスシーンを情報共有するシステムでは、自動運転車両開発時の安全性検証に資する多様なシナリオの提供が可能に。NEXT Logistics Japan社、ヤマト運輸社が開発した(3)自動運転トラックを想定した共同輸送効率化の支援システムでは、物流事業者のトラックの積載率や稼働率を向上させることが可能となります。
さらに(3)では、自動運転遠隔監視システムおよび当社の(1)と連携ができる環境を構築しました。合わせて、共同輸送時のトレーラーの不正連結や荷受人に扮した不正引き取りなどを抑止するシステムの開発を通じ、共同輸送オペレーションのトレーサビリティ管理設計を実施しました。